
I have long admired Actobotics, a “robotics building system based around extruded aluminum channels, gears, precision shafts, and ball bearings”. It’s like a beautiful, heavy-duty, precision-crafted Erector set. For some reason, I never bought any. It’s kind of expensive, and there are so many parts (470, at least when SparkFun started carrying them last year) that I didn’t really know what to buy.
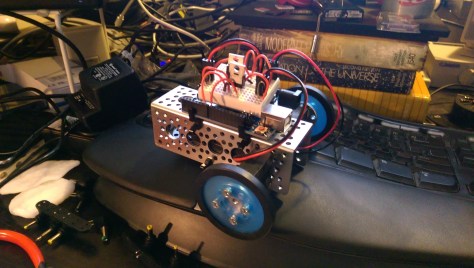
So, I bought a kit! I bought the ActoBitty 2, ROB-13047. It’s a little two-motor tricycle robot, with clips for mounting an Arduino Uno and just enough room left over for some sensors. It comes with motors, wheels, a little fixed caster, and a battery case, all of it mounting on about 4″ of that lovely aluminum channel. Thirty bucks at SparkFun.

Assembly was totally straightforward, though it didn’t come with any printed instructions, just a link to a video of someone putting one together (as it turns out, they have written instructions on their website). After a lot of pausing (the video was sped up in many places), I had a tiny robot. The kit doesn’t come with a microcontroller or any other way to control the motors, but it does come with a place to snap in an Arduino Uno, so I did. I didn’t have any motor shields on hand, so I just threw a couple of MOSFET transistors into a tiny breadboard and patched that into the Arduino, and then I could drive the motors.
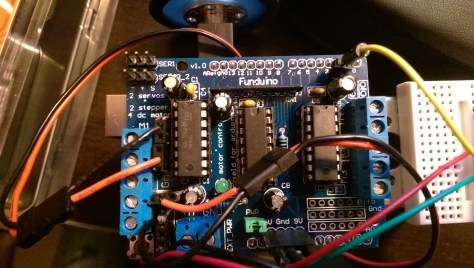
This worked well for driving either or both motors forward, but could not drive them backward. To do that, you need something like an H-bridge, which can apply power to the motor in either direction. If you can’t be bothered to put together an H-bridge (I couldn’t), you can buy a nice Arduino shield that wraps an H-bridge IC. I am very fond of the Adafruit Motorshield but, because they were backordered at the time when I was doing this project, I wound up using a cheap clone instead.
OK, so I can write a program to make the wheels turn in the directions and at the speeds that I desire. Awesome. What else?
By this point, Halloween was done, and my Parallax Ping was free. I threw that into a tiny breadboard and, for the first time (I think), peeled the sticky backing off of the back of one of those tiny breadboards and stuck it right onto my beautiful, precisely machined aluminum channel.
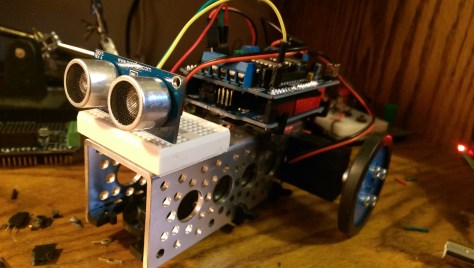
If I want to take it off, I’m sure I can scrape that adhesive off of the aluminum. It’s aluminum: it will always be beautiful.
Now my tiny robot can see the world!
The algorithm is super simple:
void loop() { int distance = measureDistance(); if (distance < DISTANCE_THRESHOLD) { rotate_left(); } else { forward(); } }
This works fine for getting around, unless one of the wheels gets stuck on something. It seems to have trouble seeing the oven; maybe it’s the angle.
